Why use it: Extendible hashing is particularly useful as an external hashing method, e.g., for databases. Data are frequently inserted, but you want good performance on insertion collisions by doubling and rehashing only a portion of the data structure (and not the entire space). Also, while regular internal hashing requires a large table with a lot of unused entries for good insertion and retrieval performance, extendible hashing's requirements for excess space is small.
Table and Buckets: The scheme comprises a hash table, which may be stored in main memory
and one or more buckets stored on disk. The table size is always 2d
where d is called the global depth. Each table entry points
to one bucket, i.e., contains a bucket pointer.
A given bucket may have several table entries pointing to it.
Retrieval: To do retrieval, use of hashing is straightforward. The hash function is applied to
some subset of the data (called the key), giving a result. Using the result's bit string,
d contiguous bits
give the index in the hash table. Follow the bucket pointer to the
target bucket. If the low order bits are used, then this is equivalent to doing
a h(key)%TABLESIZE. For the remainder of this write-up, however, I'll use the high order bits
in order to simplify the drawing. (note, during the lecture on 4/4 I used the low-order
bits)
Insertion: For insertion when the target bucket does not overflow, the process is also
straightforward. Hash the key, take d bits to find
the index, follow the hash table entry to the target bucket.
Insertion where d' < d: It is for insertion causing bucket overflow that things get interesting.
Each bucket has associated with it a local depth denoted d'.
If d' for the overflowed bucket is less than d, the global depth, then
a new bucket is allocated. Both the new bucket and the overflowed bucket are assigned local depth
d'+1. The overflowed bucket contents are rehashed.
The rehashed data will go into the original bucket or the new bucket.
This is a consequence of using d
contiguous bits to hash. A bucket with depth d' has data that is distinguished
from data in any other bucket using only d' bits. But the table makes use
of d bits to find a bucket. For a hash value =
b5b4b3b2b1b0,
d=3, d'=2, bits b5b4b3 are used
to find the index (and hence the target bucket), while bits b5b4
are the same for all elements of the target bucket.
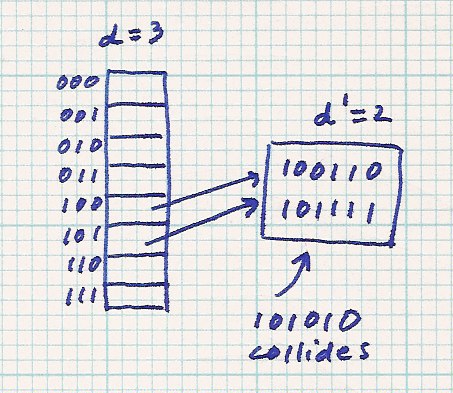
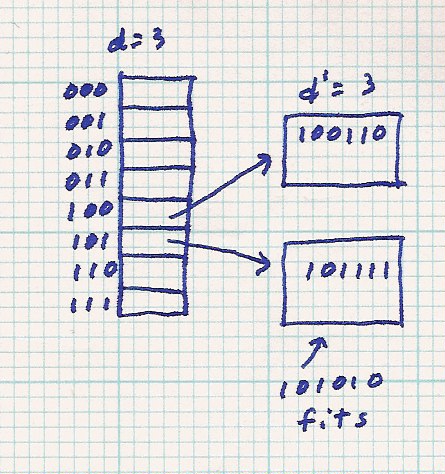
Here is an example. Only the buckets and table entries of interest are shown. For this and future examples, we'll use bucket size = 2 to have lots of overflow.
| Before split | After split |
| |
|
Notice the original bucket is reached through index 100 or 101. After it is split and rehashed, all the original data can only go to the buckets indexed by 100 or 101. The new data (101010) goes through index 101 to overflow the original bucket. After the split and rehash, the 101010 goes through index 101 to reach the new bucket. The rehashed data will never go through index 000 (for example).
As long as the data causes overflow on a bucket with d' < d, the
process of splitting the bucket and rehashing can continue as necessary.
Insertion where d' = d: When d' = d, however, the
overflowed bucket cannot be immediately split because there is no "give" in the hash table.
Instead the hash table is doubled in size to 2d+1 elements. Thus, the new global depth is d+1 (and now the local depth
of the overflowed bucket is less than the global depth, and we already know what to do with that
case). Each entry in the original hash table, indexed with bkbk-1. . .b0
is duplicated into two entries: bkbk-1. . .b00 and bkbk-1. . .b01.
The bucket pointer originally in bkbk-1. . .b0 is copied to
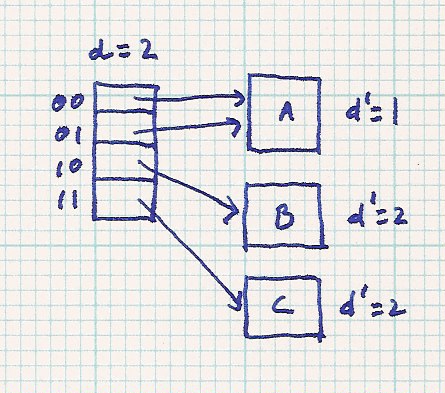
both of the new entries. Here is an example. Buckets are labelled with 'A', 'B', etc.
| Before table doubling | After table doubling |
 |
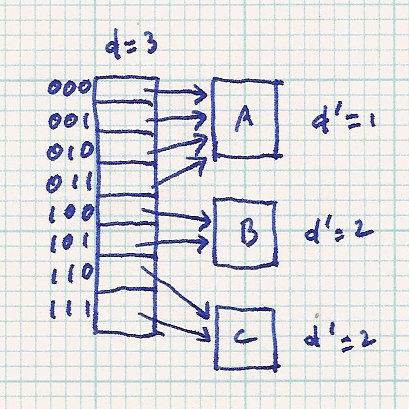 |
So, before the table double, element 00 points to bucket A. After the table doubles, index 000 and 001 both point to bucket A. Before the table doubles, d=2. After the table doubles, d=3. Of course, all d' values are unchanged because buckets have not been split.
When there is overflow on a bucket with d' = d, the table must be doubled (the new d is now one greater than the d' of the overflowed bucket); then the overflowed bucket is split (cause the d' on the overflowed and the new buckets to be incremented by one); the overflowed bucket is rehashed; the new insertion element is retried.
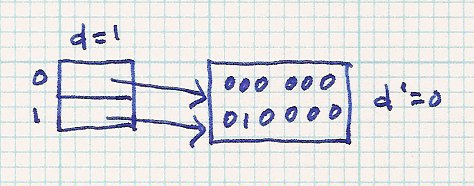
Big demo: To demonstrate this, we'll hash the following data, only the hash value is binary is given,
to an initial table size 1, d = 0 (20 = 1). I'll only give the first 6 bits of the data.
Recall that we're using the high order bits as indices.
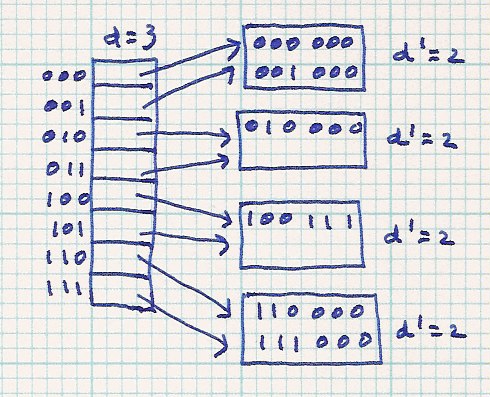
000000, 010000, 110000, 001000, 111000, 100111, 111111, ...
| Initial | 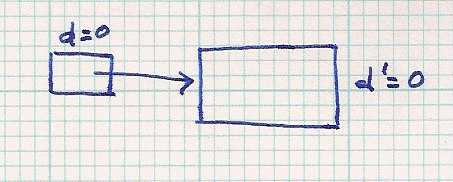 | |||||
| insert 000 000 - - > no problem |  | |||||
| insert 010 000 - - > no problem | 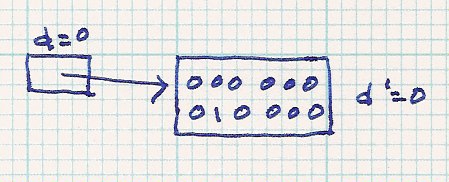 | |||||
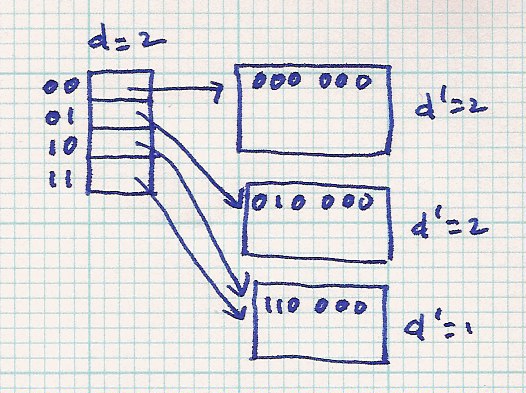
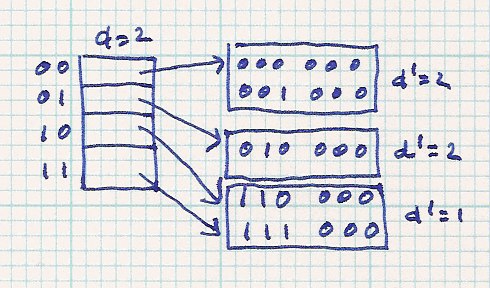
| insert 110 000 - - > d > d', split bucket |
| |||||
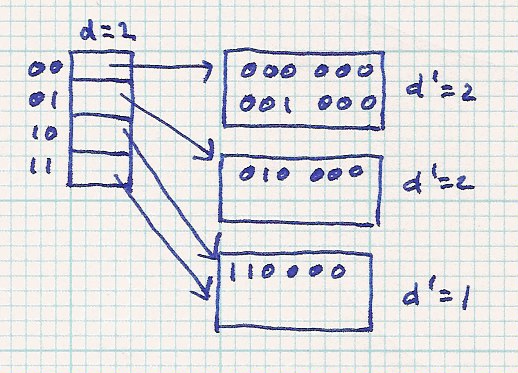
| insert 001 000 - - > d > d', split bucket |
| |||||
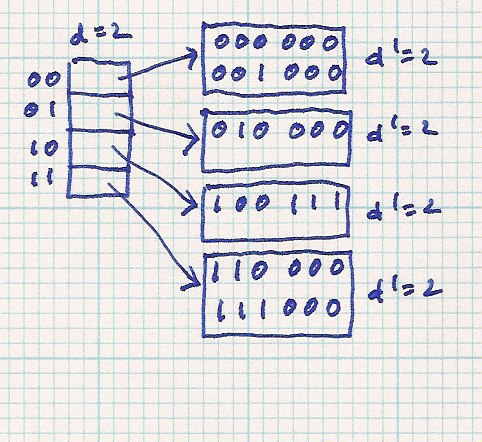
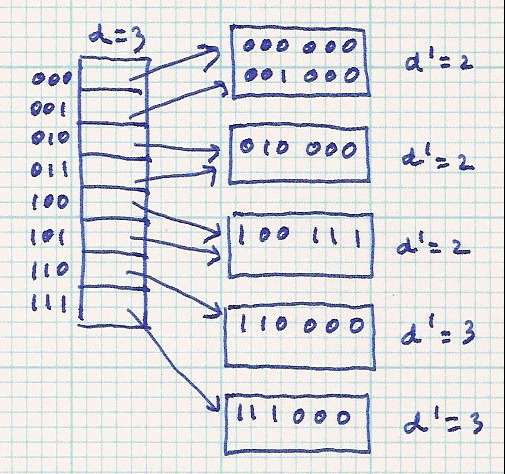
| insert 111 000 - - > no problem |
 | |||||
| insert 100 111 - - > no problem |
| |||||
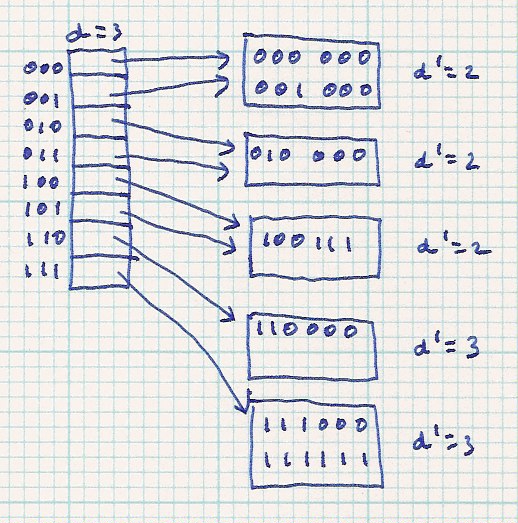
| insert 111 111 - - > d=d', double table |
|
Comments on programming
int and thus occupies 4 bytes, and the sector
size is 1024 bytes. p * 220 + 4 ≤ 1024 p ≤ (1024 - 4) / 220 p = floor(1020/220) = 4The bucket size is 4.
int (for d') and 4 Records, you would define (in pseudocode):
class Bucket {
int depth;
Record [4] data;
}
Then, allocate space in main memory for one Bucket and, using one read statement, read the desired bucket (file record) into the allocated
space. The four different data records are stored in the data array. If you want to
keep track of how many data records you have stored, then add that to the bucket definition,
recalculate bucket size and change the definition of Bucket. Read in the original bucket to main memory, Add the new data record to an available location in the data array. Write the bucket to the original bucket location (watch out! the file cursor usually advanced when you did the read).Note also that when you are writing a completely new bucket, it goes to the end of the file.
null or 0 or
any other data that indicates empty to you. In main memory, an empty bucket has allocated space,
even though it contains no meaningful data yet.
Read the original bucket into memory.
Save the file address of the original bucket to tmp.
In the hash table, change the two bucket pointers that point to the original bucket to null.
Allocate space for two new buckets in main memory.
Rehash all data records in the original bucket to the corresponding new bucket (memory ops only).
After all data records are rehashed,
if there is only one bucket in main memory used, then store tmp to the proper hash table location
and write the bucket to that location (overwriting the original bucket).
else (both main memory buckets are used in the rehashing), then
overwrite one bucket as above (set hash table entry correctly)
write the second bucket to the end of the file and set hash table entry.