
David and Susan's son Jackson riding in Ford F150 before we chopped it
up.

Plastic crossbeam on steering was cut to hold servo. Wooden blocks were
then glued to servo and bolted
down to plastic crossbeam (not shown). A wooden dowel was screwed into
the servo horn and inserted
thru steering beam.
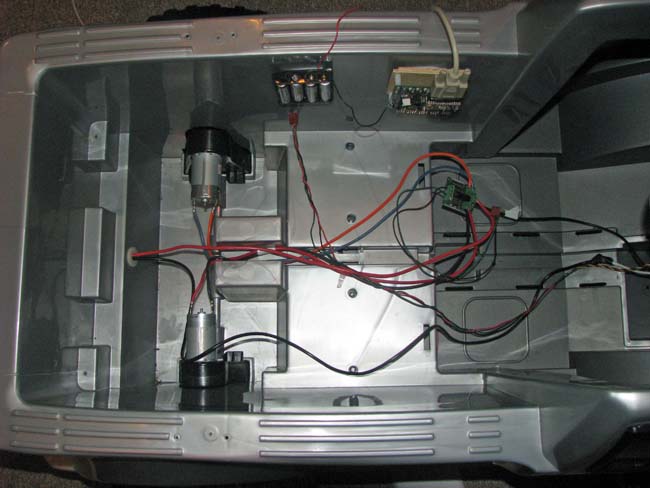
Adding some guts (more description in later photo). Note grommet and
wiring going out of rear. We mounted
an master on/off switch on the back of the truck.

Power to microcontroller board provided by 4 x 1.2V AA nimh batteries.
We later upped the voltage to 6
batteries (7.2V) to provide more "juice" to the steering servo.
Microprocessor is a Bot Board II from
Lynxmotion, microprocessor is a Basic Atom Pro.

Dimension Engineering 2 x 5 Sabertooth motor controller. Somehow we
toasted it; replaced later with
a 2 x 10 .

Initial assembly. From left: Erik Schweller, Mike Garrison and Viola
Schweller.


Left: a fairly completed machine. Right: webcam mounted on PVC tubing
with rubber bands.
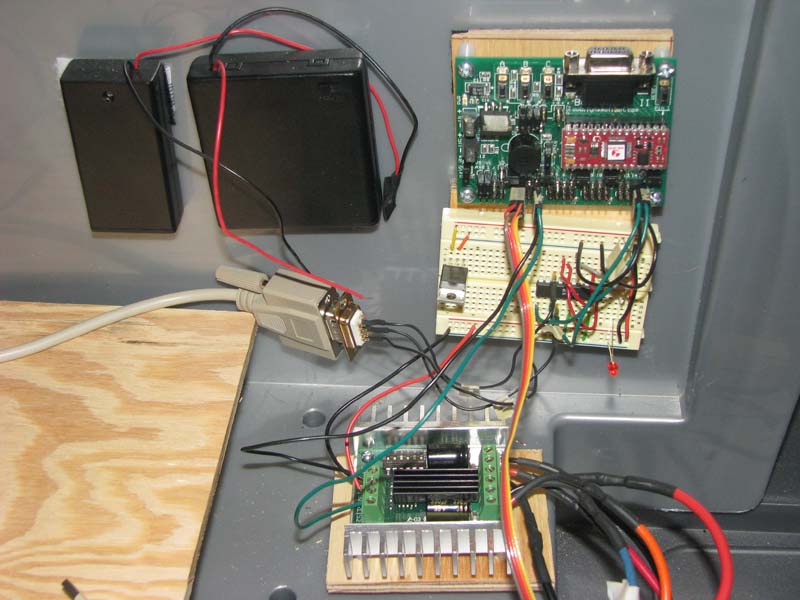
Final electronics. 7.2V provided from 6 AA Nimh batteries.
Microprocessor is top right. Breadboard contains supporting
circuitry for RS-232 interface to PC (MAX233 chip, 5 volt regulator).
Motorcontroller is on the bottom.

Sonar detector mounted on front.

PC will ride on top and provide image processing via Matlab.
(6 months later) COSC 479/592 Fall 2008 is now over, and the students
had some great ideas of their own. Here's the video put
together by Byron Heads, Aaron Schact amd Mike Garrison and shown at
the 2009 EMU Undergraduate Symposium:
Final Robot Project